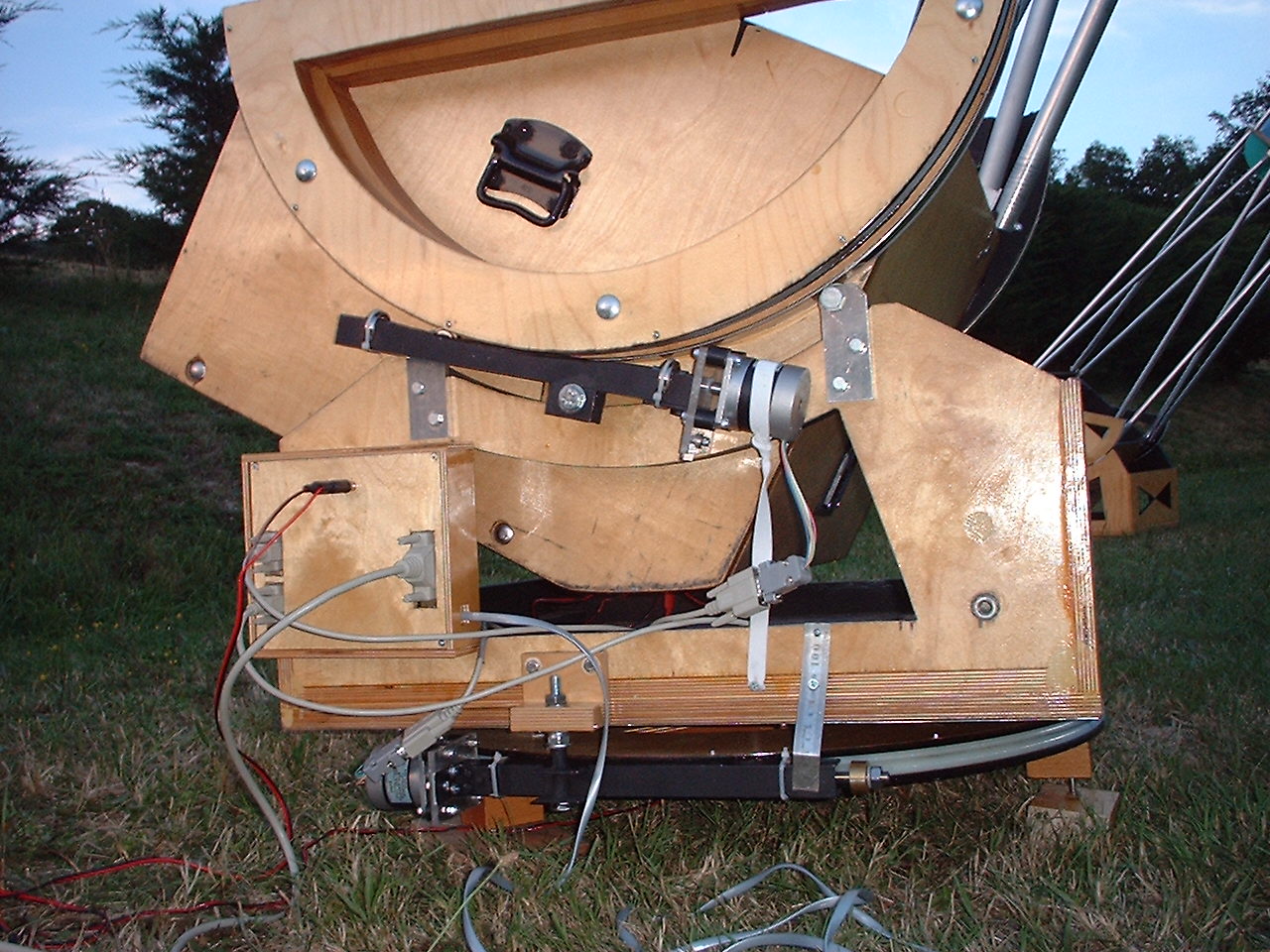
Zoals op de foto hierboven te zien is, bestaat de aandrijving uit wormwielen en wormen op de azimuth en de hoogte as. De wormwielen zijn gemaakt van twee tegen elkaar liggende nylon M10 draadeinden (de methode van Rex Kindell, zie linkspagina). De vertraging is 1434:1 voor de azimuth aandrijving en iets minder voor de hoogte aandrijving. Met 40 microsteps geeft dat een microstapgrootte van 0.11 boogseconden. Hier staat beschreven hoe ik mijn microsteps heb afgesteld en hier staat beschreven hoe ik mijn 'fullstep size' heb afgesteld.
Tegen de bodem van de rockerbox heb ik een 1 mm dikke RVS plaat geschroefd. Deze loopt op drie sets van elk twee rolschaatslagers. De hoogte lagers, bekleed met 0.5 mm dikke RVS strips, lopen aan weerszijden elk op twee van zulke lagers, die vastzitten op een 6 mm dikke aluminiumstaaf.
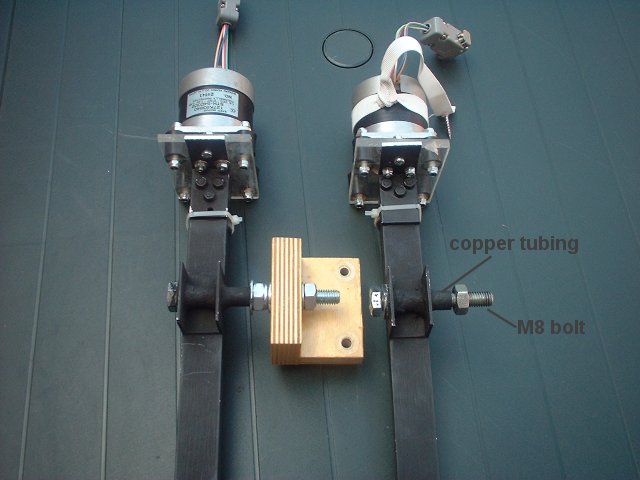
Montage van de motoren
Om de motoren en wormen te monteren heb ik Dale Eason's methode gebruikt (link op de linkspage). Op de foto hieronder is te zien hoe de motoren aan de wormen (RVS draadeind) verbonden zijn. Beide worm-wormwielcombinaties scharnieren om een M8 bout. De azimuthworm wordt tegen het wormwiel gedrukt met een stukje van een oud metalen liniaal, de hoogteworm met een stukje elastiek. Aan het eind van de azimuthworm zit een klein vliegwiel. Elke worm wordt door twee rolschaatslagers geleid. Deze lagers zitten verankerd in een gleuf in aluminium hoekprofiel en worden opgesloten met enkele borgmoeren. Een 'tie-wrap' zorgt ervoor dat de lagers niet uit de gleuf komen. De motoren zijn op een plexieglas plaatje gemonteerd met anti-vibratierubbers. De assen van de motoren zijn met stukjes benzineslang aan de worm gekoppeld. Klik hier om de achterkant van de motor-wormcombinaties te zien en hier voor een detailopname van het vliegwiel op de azimuthworm.

De drukknoppen op het handpad werkten niet goed. Al na een half jaar ging het functioneren ervan achteruit. Ik moest een knop (niet steeds dezelfde) vaak enkele malen indrukken voor er beweging in de motor kwam. Na ongeveer anderhalf jaar deden ze het zo slecht, dat ik besloot andere knoppen te monteren (zie plaatje hieronder). De nieuwe knoppen zijn wat dikker dan de oude (9.5 mm in plaats van de 7 mm of the originele) en ik moest dus de gaten wat opboren. Ze passen wel goed in het kastje.

|


{kind=link}
{kind=link}
{kind=link}
{kind=link}